


東北大学・山口明彦助教が研究をすすめる触覚センサ「FingerVision」は、物体を操作するうえで欠かせない触覚を、視覚をベースに実現した先進技術だ。株式会社FingerVisionでは、この技術を応用して様々な社会課題を解決することを目指している。
実世界で使えるロボット技術の研究開発に長年取り組んできた山口助教は、もともと「ロボットを使って、人間がやっている物体操作を自動化していきたい」という研究者としての強いモチベーションを持っていた。FingerVisionは山口助教がカーネギーメロン大学在籍時から研究を続けている技術。この技術の社会実装を考える中で、外部のアクセラレータ主催のイベントで出会ったのが、濃野友紀代表だった。2021年10月に株式会社FingerVisionをスタートさせた。
同社のコア技術であるFingerVisionのコンセプトは、人間の触覚を工学的に実現すること。例えば厚い手袋を身につけていたり、寒さで手がかじかんでいたりすると、人間は手の感覚が脳に正常にフィードバックされず、ものを落としてしまうなど思い通りに物体を扱うことが難しくなる。「そう考えると、触覚というのは物体を操作するうえですごく大事な要素なんです」と山口助教は強調する。
重要な要素であるにもかかわらず、実際に工場などで使われている産業用のロボットを見たときに、「触覚センサが使われていることはほとんどない」(山口助教)という。なぜか。その理由として、センサの壊れやすさや、多数の配線を必要とするセンサを搭載するときの手間などが挙げられる。既存の触覚センサの複雑な構造が、産業への導入のネックになっているのだ。
さらに、山口助教は「人によって触覚センサの捉え方が微妙に違う」とも指摘する。そもそも人間の触覚は力の分布、滑りや硬さ、温度の感覚など、さまざまな感覚を取得できる「マルチモーダル」なもの。したがって、触覚を工学的に実践するとなると、「人によっては圧力の分布のセンサをつくろうとしたり、人によっては滑り覚のセンサをつくろうとする。統一された触覚センサというものが無いんですね。だから、こういう使い方をしたらこういうふうに触覚が使えるんだ、ということが確立していないんです」
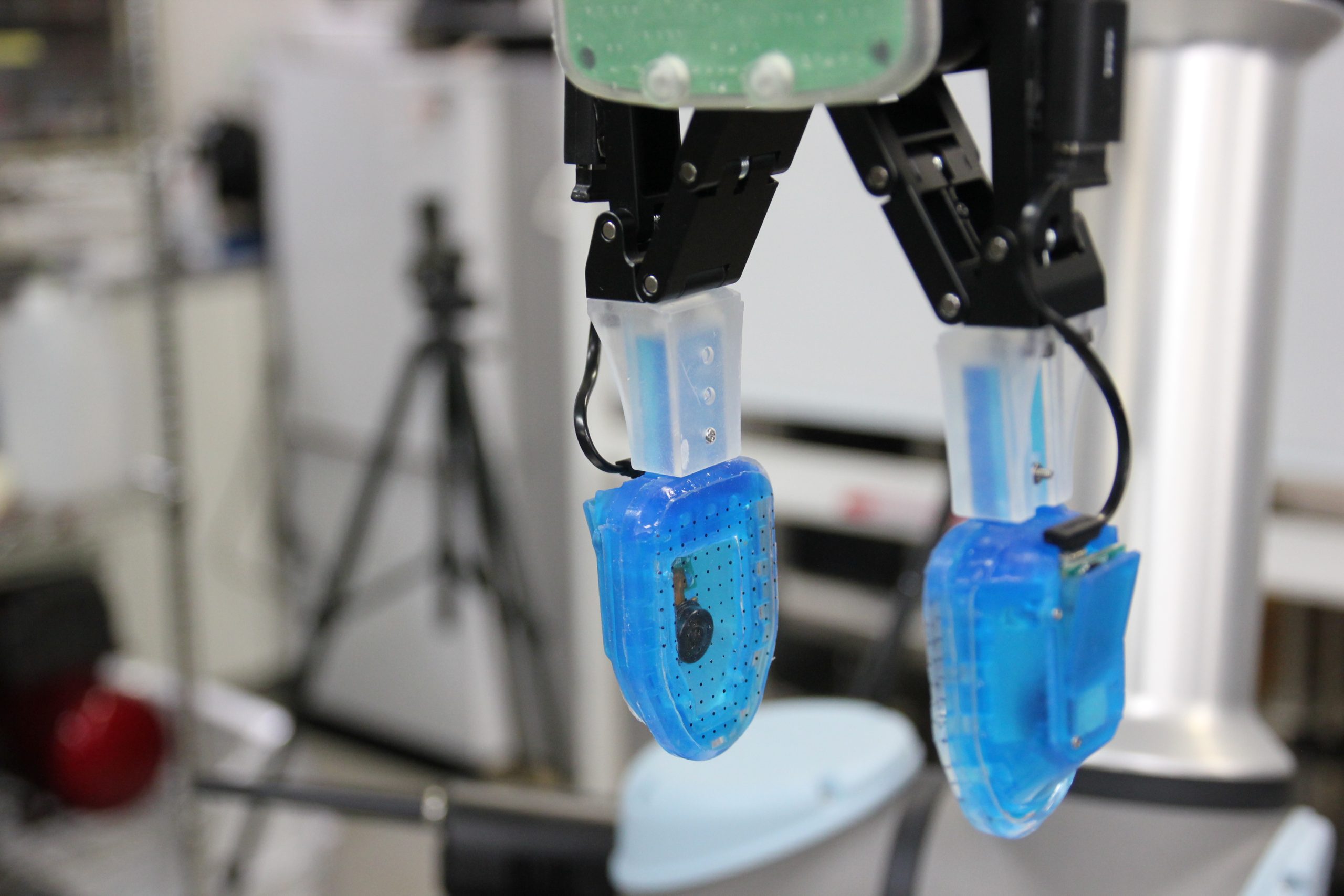
FingerVisionの構造はいたってシンプルだ。電子基板であるカメラと、シリコーン製の透明で柔らかい皮膚で構成されている。FingerVisionの「Vision」はカメラの意味で、触覚よりもロボットの分野で普及が進んでいる視覚センサの技術をベースに触覚を再現。柔らかい皮膚の下にカメラを設置することによって、皮膚の上で起きている物理現象をカメラでとらえることを可能にした。物体の動きをカメラで直接分析すれば、滑りの分布を捉えることも容易だ。さらに、赤外線カメラを搭載することで人間が感じる「温かい、冷たい」といった温度のセンシングもできるようになる。まさに人間の触覚と同じようにマルチモーダルな触覚センサを実現した。
シンプルな構造は、高い耐久性と低価格も同時に実現する。「カメラはシリコーン製の皮膚とアクリルのプレートによって外力と遮断されています。そのため、電子基板と外力は直接やり取りしないので、耐久性を担保することができるんです。仮に皮膚の部分が壊れたとしても、皮膚の材料は安価な素材でできているため簡単かつ安価に交換でき、メンテナンス性にも優れています」と山口助教。「比較的安価で、経済性にも優れているので、産業応用に非常に向いているセンサだと考えています」と自信をのぞかせた。これには濃野代表も、「構造がシンプルなので、イニシャルの製造原価だけでなく、故障対応やバージョンアップの際にもコストが肥大化しません。加えて製品そのものだけでなく、製造するための設備投資も劇的に抑えられます。こう考えると、他の技術アプローチだと利益を出しながらの価格競争力で追いつけないところが自明なんですよね」と太鼓判を押す。
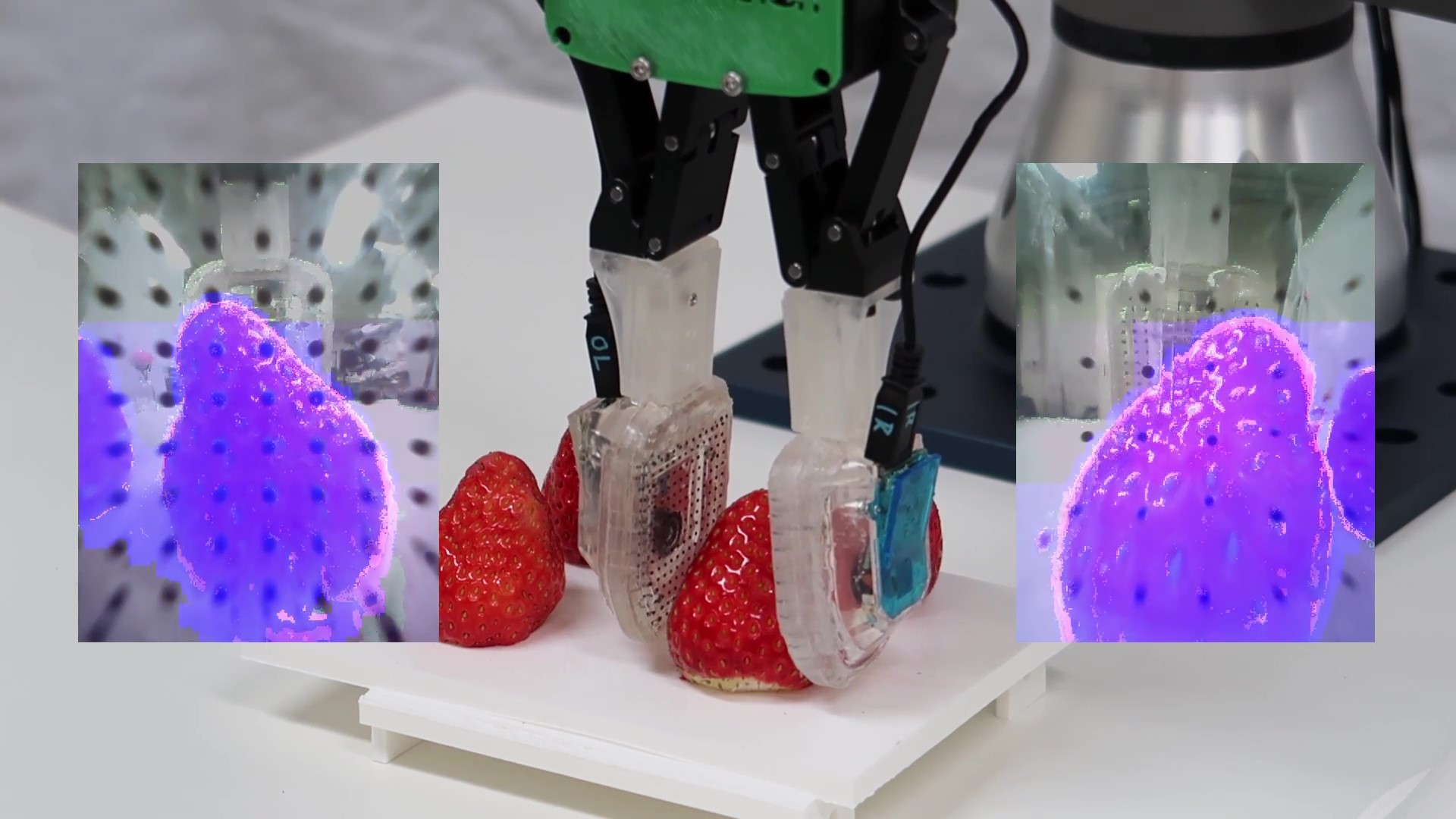
現在FingerVisionでは、食品業界への応用を視野に技術の開発を進めている。「食品業界が抱える課題に対して、FingerVisionで解決策を提供できないか、という目線がありました」と濃野代表。「日本ではバラエティーのある食べ物を”当たり前に”比較的安く食べることができますが、それは他の国から見たらイレギュラーなこと。
国内に優秀な人的労働力が豊富にあり、諸外国と比べても相対的に日本が豊かであったため日本で働くことに前向きな外国人が多くいた、という構造に支えられていました。今は安定的においしいものが食べられていても、人手不足や、日本で働くことの相対的な魅力の低下、食品の輸入が厳しくなることなどで、そうではなくなる世の中が来る」と指摘する。「一つの業界にフォーカスしてみても、我々の視座は”自動化”にとどまらず、もっと大きな、社会としての課題にリーチしていきたい」と意欲を見せた。
実際の現場からも、「触覚センサを活用したロボットシステムに対してポジティブな面での可能性を感じてもらえている」と手応えを口にする。食品は毎日消費される商材であるため、生産数量も多く、製造工場に求められるスループットも高い。そのため、高速化や自動化が不可欠であり、「機械化」のニーズは強く、多くの領域で取り組みがなされているのは事実である。ただし、そういった要求水準の高い工業要件を満たそうとすると、どうしても専用の機械を導入する必要性が生じる。専用の機械は、特定の食品でかつ特定のタスクであれば、求められる工業要件を実現できる一方で、用途が限定されているのでユーザーが少なく、必然的にメーカーは高額で機械を販売せざるを得ない。「つまり、1種類の販売量が多く”規模の経済”を効かせられるビジネスができるユーザーは、機械に投資ができる。一方で多品種を扱い、1種類の生産量が中~小規模である工場では、ユーザー側から見たときに、投資対効果が合わない。そうなると、現在は人件費が安く収まっているので結局人手に頼った生産に逆戻りしてしまう。今のジレンマから抜け出せないんです」。濃野代表は、FingerVisionの高い汎用性がこの問題を解決できると力を込める。「FingerVisionは、汎用的なタスクが期待されているロボットに触覚を組み合わせることで、そのロボットの汎用性をさらに高めることができるんです。さまざまな食品に対応できますし、様々なタスクへの転用の可能性があるのも間違いない。それができると、ロボットシステムの「稼働率」が上がり、投資の採算性も合うようになる。だからこのシステムで、劇的にものづくりのやり方が変わるのではないかという期待感は、すごく大きいと思います」。同社では2022年内の商業化を目標としている。
技術面では、今後はさらにFingerVisionの改良を進めていくことを考えている。力をセンシングしたり、滑りを検出したりする能力や、物をつかんだときにそれがどのくらいの重さで、どのくらいの硬さなのかなど、センサとしての機能の洗練を目指しているという。
目指すところはもうひとつある。それは、「触覚センサを使って何ができるのか」。山口助教は「実際にロボットにセンサを搭載して、どういう物体操作ができるのかを追求していきたいです。ロボットで実際にできることを増やして、食品工場で働いている人たちがやっているプロセスを自動化することが、彼らにとってのメリットですし、それを触覚センサを使って実現するためにはどうすればいいのか。これをクリアしていくのが技術的な課題です」と語る。
濃野代表も「今見ているところだけじゃなくて、FingerVisionにはいろいろな可能性がいくらでもある」と、その未来に期待を込める。可能性は留まるところを知らない。
